> For the complete documentation index, see [llms.txt](https://quad-drone-lab.gitbook.io/product-specification/llms.txt). Markdown versions of documentation pages are available by appending `.md` to page URLs; this page is available as [Markdown](https://quad-drone-lab.gitbook.io/product-specification/q950-v1-q950-v1-pro.md).
# Q950-V1 / Q950-V1 Pro 전천후 다목적 자율주행 드론 키트
### "극한의 환경을 극복하는 최상의 다목적 자율주행 드론 플랫폼"
\*\***Q950-V1 전천후 다목적 자율주행 드론**\*\*은 전력선 점검, 해상 정찰, 조난자 수색 및 다양한 산업 모니터링을 위해 설계된 950mm급 대형 쿼드콥터 드론 키트입니다. IP54 방수 프레임, 12S 초고전압 파워트레인과 더불어 다중 비전/LiDAR 센서 융합 기술과 최대 40km 장거리 통신망이 완벽하게 통합되어 연구 및 산업 현장에서 최고의 성능을 제공합니다.
> 이 조립용품 세트는 사용자가 조립.분해.코딩 등을 통해 과학실습용으로 사용하는 제품으로, 조립된 완성품에 대한 전자파 적합성평가와 KC인증은 받지 않은 제품 입니다.
### 핵심 특장점 (Key Features)
#### 1. 첨단 센서 융합 기반 V-SLAM 및 VINS 자율주행
고성능 Intel RealSense D455 심도 카메라와 360도 전방위 인식이 가능한 Livox Mid-360 LiDAR, 전방 RADAR 탑재가 가능 합니다.
NVIDIA Jetson Orin의 강력한 GPU(CUDA) 연산을 통해 실시간 V-SLAM(비주얼 슬램) 및 VINS(시각-관성 항법 시스템) 로직을 구현할 수 있습니다. 이를 통해 GPS 수신이 불안정한 해상 구조물 근처나 교량 하부, 실내외 전환 환경에서도 끊김 없는 정밀 위치 추정과 3D 자율 회피 비행이 가능합니다.
#### 2. 장거리/고대역폭 데이터링크 시스템
국내 전파법(KC 인증)을 통과한 장거리 데이터 통신 모듈을 장착하여 데이터 송수신 안정성을 극대화했습니다.
가시권(LOS) 기준 최대 5\~40km의 장거리 무선 통신을 지원하며, 최대 300Mbps(최적 20Mbps)의 전송 속도로 고화질 RTSP 비디오 스트리밍과 텔레메트리 데이터, 조종기 신호를 지연 없이 지상국(GCS)으로 전송합니다.
#### 3. 극한 환경을 극복하는 완벽한 내구성 (IP54 방수/방진)
모터, 변속기(ESC), 배선이 암(Arm) 튜브 내부에 밀폐되어 있으며, 에어로다이나믹 설계된 중앙 동체 역시 커버로 덮이는 구조로 먼지과 수분으로부터 전장부를 원천 보호합니다.
3개의 강력한 내부 공기순환 팬으로 내부 센서와 전장부의 발열을 외부로 신속히 배출시켜 FC와 센서의 온도 부하를 원천 보호 합니다.
배터리룸의 듀얼 락(Dual Quick-lock) 방수 뚜껑과 내부 부품의 컨포멀 코팅(Conformal Coating) 처리로 습기와 물 튀김으로부터 완벽한 보호를 제공합니다.
#### 4. 압도적인 체공 시간 및 안티재밍 정밀 항법
12S 25,000mAh 대용량 반고체 배터리와 검증된 T-Motor A6-M 동력계를 채택하여 임무 중량(약 10.4kg) 기준 약 50분 이상의 경이로운 체공 시간을 보장합니다.
선박 레이더 등의 강력한 전파 간섭 환경에서도 완벽한 헤딩(Heading)과 cm급 측위를 제공하는 Septentrio 사의안티재밍 mosaic-H (Dual RTK)가 탑재되어 안정적인 해상 비행이 가능합니다.
#### 5. 이동 및 보관 편이성
손쉬운 접이식 암대와 탈부착 가능한 랜딩 기어로 이동 및 보관이 용이 합니다.
이중 잠금 장치가 포함된 배터리 수납 커버로 배터리 탈착이 용이 합니다.
#### 6. 다양한 기능
에어드롭 서보, 스피커, 짐벌 카메라, 안테나 등 다양한 산업 목적에 맞는 외장 기기를 부착 운용할 수 있습니다.
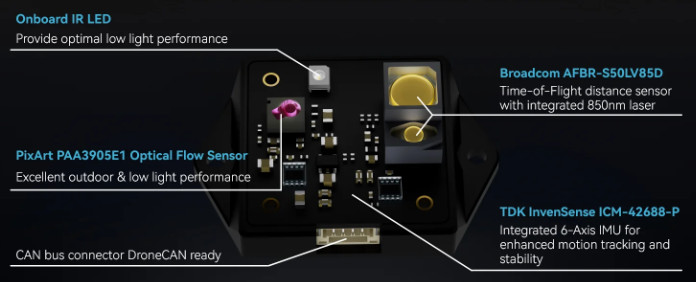
#### 7. Optical-Flow/LiDAR non-GPS 실내 정밀 주행
하방 옵티컬플로우와 라이다를 이용하여 야외 및 실내에서 호버링 및 정밀 주행이 가능 합니다.
Onboard IR LED가 장착되어 저조도의 환경에서도 안정적인 주행이 가능 합니다.
#### 8. 다양한 고배율 짐벌 카메라
다양한 고배율의 짐벌 카메라를 장착하여 AI, 감시, 정찰, 구조 등의 임무를 수행할 수 있습니다.
#### 9. Jetson Orin 컴패니언컴퓨터와 전용소프트웨어
AI 및 자율주행드론 개발에 필요한 Jetson Orin 컴패니언 컴퓨터 플랫폼과 필수 소프트웨어가 집약된 개발 툴킷 소프트웨어를 제공 합니다.
quad-compsd-orin-nano-3.2.0 포함 소프트웨어
* NVIDIA Jetpack 6.2.1
* Ubuntu 22.04.5 LTS, Kernel 5.15.148-tegra
* ROS2 Humble
* CUDA (v12.6.68)
* cuDNN (v9.3.0.75)
* TensorRT (v10.3.0.30)
* VPI (v3.2.4)
* OpenCV (v4.11.0) - *CUDA 빌드*
* Jtop
* Terminator Terminal
* MAVSDK C++ (v3.8)
* MAVSDK-Python (v3.8)
* MAVROS ROS2 Humble 버전
* PX4 uORB ROS2 Library (px4\_ros\_com, px4\_msg)
* PX4 ROS2 DDS Agent (Micro XRCE-DDS Agent - v3.0.1)
* 쿼드(QUAD) 드론연구소 PX4 OFFBOARD 코드 샘플
* Livox-SDK2 (v1.2.5)
* Livox ROS2 Driver (v1.2.4)
* RealSense SDK2 (v2.57.5) - *CUDA 빌드*
* RealSense ROS2 Wrapper (v4.57.4)
***
### 상세 제원
* 비행장치 형식: 무인멀티콥터 (쿼드콥터, 4축)
* 규격 / 크기: 축간거리 950 mm / 1,120 x 1,120 x 480 mm (프롭 제외)
* 자체 중량 / 유상 하중: 8 kg (배터리 포함) / 최대 3.6 kg
* 운용 반경 / 고도: 5\~10 km (LOS 통신 반경) / 150m 이하
* 통신 속도: 최대 300Mbps (고해상도 영상 및 LiDAR 포인트 클라우드 전송 가능)
* 최대 비행 시간: 약 60분 (임무중량 9 kg 기준)
* 최대 풍속 저항: 12 m/s (산업용 등급)
### Q950-V1 다목적 자율주행 드론 키트 포함 부품
#### \[기본]
* Holybro Pixhawk 6X (기본) / Pixhawk 6X Pro (Pro) 비행제어기
* NVIDIA Jetson Orin Nano 8GB (WiFi 모듈, 마운트, UBEC 전원 모듈 포함)
* 쿼드(QUAD) Jetson Orin SD카드 (ROS2, MAVSDK, V-SLAM S/W 탑재)
* Q950 다목적 자율주행 드론 프레임 및 파워트레인 시스템
* LiPo 25,000mAh 12S 반고체 배터리 (1개)
* Radiomaster TX12 Mark II 조종기/수신기
* 전용 프로펠러 3쌍
* M10 GPS
* 완전 방수 메탈 기어 서보(에어드랍 장치)
* 사용법 및 개발자 교육 (3Hr)
#### \[옵션]
* 프리뉴 D-DL DataLink (KC인증, 기체/지상단 1SET) (장착 및 세팅 포함)
* SIYI UniRC7 Pro (KC인증)
* Holybro mosaic-H (Dual) RTK GNSS (장착 및 세팅 포함)
* H-RTK F9P Base (Tripod 스탠드 포함)
* Intel RealSense D455 심도카메라 (장착 및 세팅 포함)
* Livox Mid-360 라이다 (장착 및 세팅 포함)
* Holybro H-Flow 옵티컬플로우/라이다 (장착 및 세팅 포함)
* SIYI A8 mini 3축 짐벌 카메라 (KC인증)
* 조립 및 PID 튜닝 대행
***
### 제품 사진
***
### 제품 소개영상
{% embed url="" %}
{% embed url="" %}
 #### 8. 다양한 고배율 짐벌 카메라
다양한 고배율의 짐벌 카메라를 장착하여 AI, 감시, 정찰, 구조 등의 임무를 수행할 수 있습니다.
#### 8. 다양한 고배율 짐벌 카메라
다양한 고배율의 짐벌 카메라를 장착하여 AI, 감시, 정찰, 구조 등의 임무를 수행할 수 있습니다.